Designed and simulated a ball-and-beam control system in Simulink, employing motor characterization and cascading discrete SISO controllers. The controllers were developed using an emulation approach to meet stringent specifications for zero steady-state error, minimal overshoot, and fast settling time. This project demonstrated advanced control system design and simulation skills.
- FeaturesZero Steady-State Error, Minimal Overshoot, Fast Settling Time
- TechMATLAB, Simulink, Control Design Toolbox
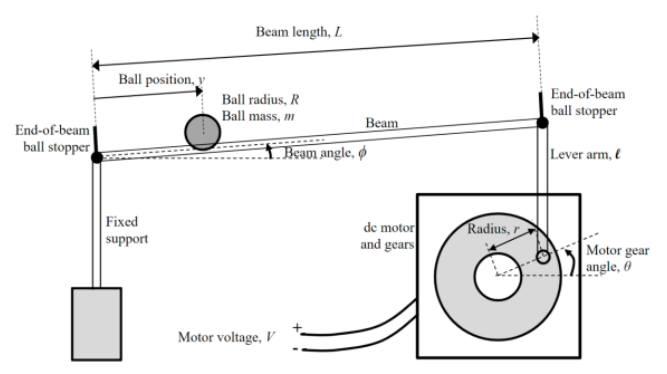
Ball & Beam Controller Setup
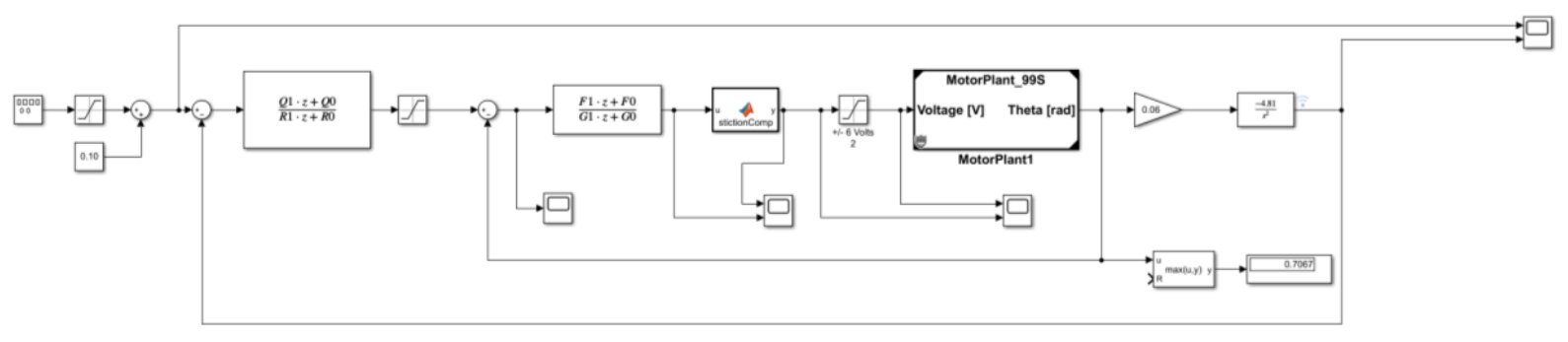
Ball & Beam Controller Design
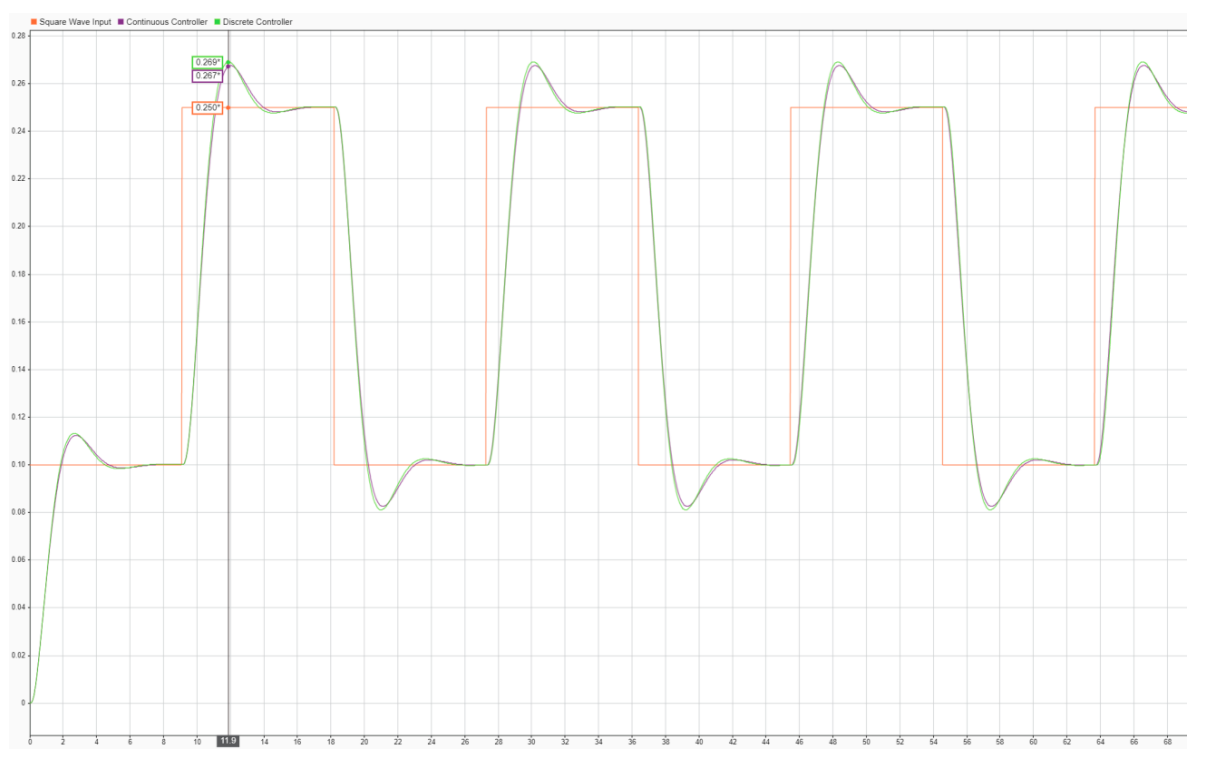
Ball & Beam Controller Result