Designed and built an autonomous robot capable of navigating obstacles using 1D Time-of-Flight (TOF) sensors and encoders. The project involved optimizing sensor placement for maximum coverage, integrating control logic on an Arduino, and adhering to budget constraints through the use of Gantt charts and decision matrices. The robot demonstrated efficient obstacle detection and navigation, showcasing a balance between hardware design, software programming, and project management.
- FeaturesAutonomous Obstacle Navigation
- TechVL53LX Time-of-Flight (ToF) Sensors, BNO055 IMU, L298N Motor Controller, Arduino Mega C++, I2C
- ToolsLaser cutting, 3D Printing, Soldering
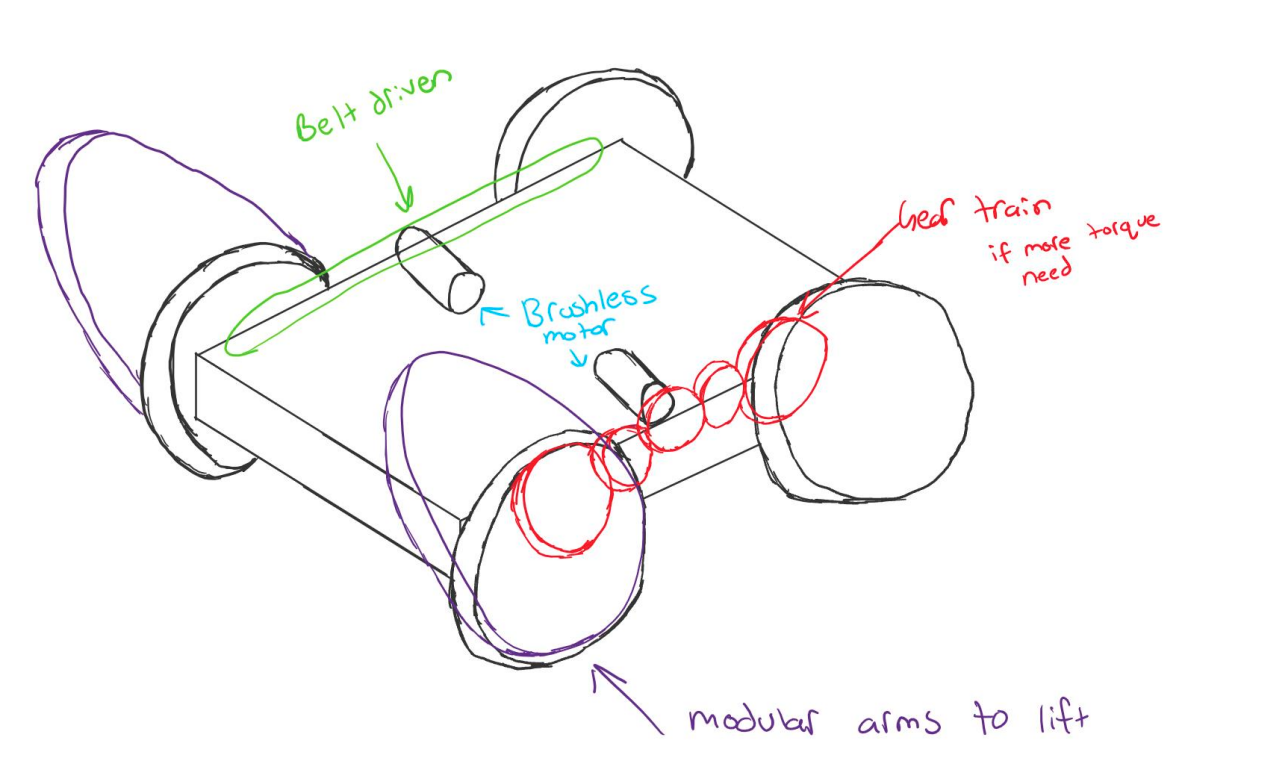
Robot Design Concept

First Design Iteration - Assembly

Third Design Iteration - Assembly Complete
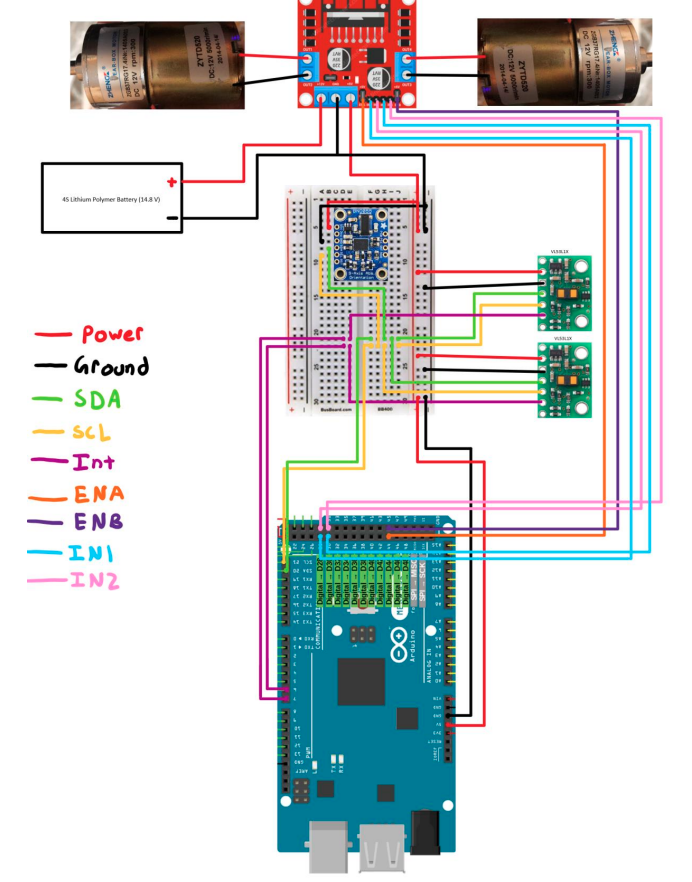
Electrical Schematic - Motors, Sensors, Microprocessor
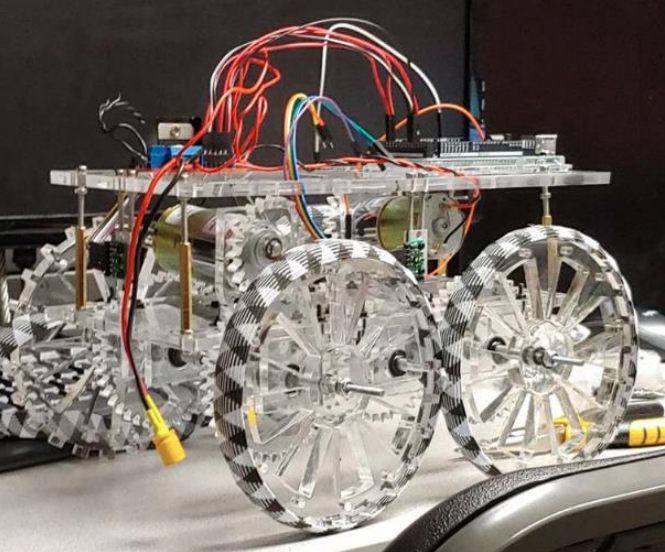
Final Robot Assembly